Arrivare bassi 3
Continuando ad approfondire l’argomento, ecco un altro articolo utile a rendersi conto che si rischia.
(traduzione automatica)
Rimanere sul sentiero di discesa: I pericoli del duck-under
James Albright 22 aprile 2019

Ogni volta che vedo un aereo da trasporto attraversare la soglia di una pista di pochi piedi, ripenso a tutti gli incidenti in cui il tentativo di “brick one” è finito male.
Il piccolo sporco segreto del passaggio sotto il sentiero di discesa è che funziona. Puoi effettivamente mirare al brick one e far atterrare l’aereo in modo da toccare terra molto vicino alla soglia della pista o prima dei marcatori dei 500 piedi. Lo vedo sempre. Puoi confermarlo guardando tutte le grandi impronte di pneumatici degli aerei appena oltre la soglia della pista. Naturalmente, questi piloti sanno che c’è il rischio che una raffica di vento improvvisa faccia cadere l’aereo prima della soglia. Ma ciò che molti di questi professionisti non apprezzano sono gli altri rischi coinvolti. Questi piloti potrebbero non aver considerato le variabili di visibilità, geometria e tecnologia. Fortunatamente, ci sono metodi semplici per contrastare ogni fattore.
Quando ho iniziato a pilotare grandi aerei per l’aeronautica militare statunitense, sembrava che alcuni piloti volassero un po’ bassi sul sentiero di discesa, sperando di individuare la pista in anticipo. Poi, una volta a vista, miravano al primo pollice di pista. In teoria, mirare al brick one andava bene perché il pilota avrebbe fatto flare con l’aereo in modo da toccare terra nei primi 500 piedi di pista. Questo era chiamato “duck-under” ed era ufficialmente disapprovato dal servizio, cioè, tranne in alcuni squadroni in cui era un modo accettato per atterrare su piste corte.
Un Falcon 900 attraversa la soglia a 10 piedi, atterrando all’aeroporto esecutivo di Austin (KEDC), Texas, 27 luglio 2017.
Nel 1981, ero un sottotenente che pilotava il tanker KC-135A e notai che alcuni piloti modificavano i loro punti di mira prima della zona di atterraggio su piste corte. “Cavolo signore”, dicevo nel mio linguaggio da “butter bar”, “non è un po’ rischioso volare intenzionalmente sotto il sentiero di discesa? E se commettessimo un errore?” La risposta inevitabile: “Non ho intenzione di fare errori. E tu?”
L’ultimo volo del Cobra Ball
Quello stesso anno, mentre mi chiedevo quali fossero i punti di mira del mio aereo cisterna, un aereo spia RC-135S si schiantò prima della pista della Shemya Air Force Station (PASY), ora Eareckson Air Station, a Shemya, una delle isole Aleutine dell’Alaska. L’aereo, il Cobra Ball, era un Boeing 707 altamente modificato con enormi porte per telecamere sul lato destro, progettate per scattare foto ad alta risoluzione dei lanci di missili di prova sovietici. Fu un’importante missione della Guerra Fredda che richiese ai suoi equipaggi di volare per lunghe missioni operative e di addestramento e poi di volare in un impegnativo avvicinamento radar di precisione (PAR) alla piccola isola, dove prevalevano soffitti bassi e forti venti trasversali.
La pista di Shemya sull’isola di Attu, Alaska. Credito: U.S. Air Force
Il pilota aveva volato per la maggior parte del suo avvicinamento PAR “leggermente al di sotto del sentiero di discesa”, aveva volato brevemente “leggermente al di sopra”, ma aveva terminato “ben al di sotto” dopo aver avvistato le luci di avvicinamento.
In un avvicinamento PAR, il controllore osserva il progresso verticale e orizzontale del ritorno radar di un aereo in discesa, noto come “skin paint”, rispetto a un sentiero di discesa di 3 gradi e a una linea centrale della pista estesa. Il pilota tenta di mantenere la rotta assegnata e una velocità verticale fino a un’altitudine di decisione di 100 piedi. L’indicatore di velocità verticale del Cobra Ball era un dispositivo puramente meccanico che ritardava la velocità verticale effettiva fino a 9 secondi, quindi il pilota era tenuto a considerare questo ritardo quando trasformava le istruzioni del controllore in impostazioni di beccheggio e potenza. L’unica consapevolezza della situazione del pilota proveniva dalla voce del controllore. Un avvicinamento PAR è impegnativo in una buona giornata; è estremamente difficile con scarsa visibilità e forti venti trasversali.
Basta leggere gli ultimi 1 minuto e 43 secondi. del nastro PAR per capire cosa è successo. RFC è il controllore finale del radar; 66 è il nominativo di chiamata dell’aereo, Exult 66; e TWR è il controllore della torre.
RFC: “Leggermente sopra il sentiero di discesa; direzione uno zero sei”.
RFC: “Virata a sinistra direzione uno zero quattro; 2 miglia dall’atterraggio; leggermente sopra il sentiero di discesa”.
RFC: “Direzione uno zero quattro, virata a destra direzione uno zero sei”.
RFC: “In rotta, direzione uno zero sei; deriva a sinistra, naturalmente, virata a destra direzione uno zero otto”.
RFC: “Virata a destra direzione uno uno zero”.
RFC: “In discesa… a sinistra, naturalmente, direzione uno uno zero”.
RFC: “Leggermente sotto il sentiero di discesa; 1 miglio dall’atterraggio”.
RFC: “Alla decisione altezza”.
66: “Signore, abbiamo le luci”.
RFC: “Ricevuto”. RFC: “Leggermente sotto il sentiero di discesa, leggermente a sinistra ovviamente.”
RFC: “Molto sotto il sentiero di discesa.”
RFC: “In rotta; oltre la soglia di atterraggio.”
RFC: “Torre.”
TWR: “Si è schiantato vicino alla fine della pista uno cinque, intendo uno zero.”
Il pilota ha dimostrato un controllo di rotta molto preciso, ma tendeva a favorire il lato basso del sentiero di discesa. Una volta individuate le luci di avvicinamento, è andato ben al di sotto del sentiero di discesa. Questo mostra cosa è successo, ma non perché. L’aereo si è schiantato contro le luci di avvicinamento che erano state costruite su una scogliera appena prima della pista, che non aveva un sorpasso. L’aereo è stato fatto a pezzi. Sei dei 24 membri dell’equipaggio sono morti. Ma perché?
Se Shemya avesse avuto un sorpasso standard di 1.000 piedi, il duck-under avrebbe comportato un atterraggio duro e qualche presa in giro bonaria dall’equipaggio al pilota, e niente di più. Ma quella pista non aveva un sorpasso. L’aeronautica ha attribuito l’incidente all’incomprensione da parte del pilota dell’impatto di un vento contrario sul suo tasso di discesa verticale target e al fatto che aveva “canalizzato sulle luci di avvicinamento”.
Ma dare la colpa alla comprensione del vento contrario e alla fissazione del bersaglio da parte del pilota sulle luci di avvicinamento non coglie affatto il punto. Un anno dopo quell’incidente, mi sono ritrovato a pilotare un modello molto simile del Boeing 707, un EC-135J. Eravamo molto più pesanti del classico aereo cisterna KC-135A, avevamo motori più grandi con tempi di “spool up” di accelerazione motore più lunghi e volavamo a una velocità di avvicinamento finale molto più elevata. E i nostri freni erano discreti, nella migliore delle ipotesi. Era una reazione naturale per molti dei nostri piloti mirare corto quando si trovavano di fronte a una pista contaminata. Ho volato su Shemya un paio di volte e la scogliera che si trova alla fine della pista 10 è intimidatoria. Tutti i miei atterraggi su quella pista erano in buona visibilità sotto un soffitto di circa 400 piedi e un vento trasversale di 25 nodi. Puoi abituarti a vedere le luci di avvicinamento di lato mentre fai un granchio con l’aereo appena prima dell’atterraggio. Quando ti abbassi sotto, quelle luci di avvicinamento sembrano più in alto sul parabrezza. Immagino che anche a questo ci si possa abituare. Ma il meteo non deve essere pessimo per rappresentare un rischio di duck-under.
Ultimo volo del C-GXPR
Prima di aggiornare gli aerei, l’equipaggio del Bombardier Global 5000 C-GXPR era un visitatore abituale dell’aeroporto di Fox Harbour (CFH4), Ontario, volando con il suo fidato Challenger 604. L’aeroporto ha una pista di 4.885 piedi, con una soglia spostata di 80 piedi all’estremità in uso, riducendo così la pista disponibile a 4.805 piedi. Poco prima della soglia spostata c’era un’area erbosa non asfaltata, in pendenza da una strada alla pista.
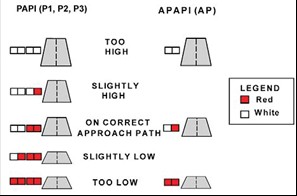
Indicazioni PAPI contro APAPI. Credito: Transportation safety Board of Canada
L’equipaggio ha calcolato che per l’atterraggio erano necessari 4.300 piedi e ha pianificato un touchdown a 500 piedi. Matematicamente tutto ha funzionato con 5 piedi di riserva, tranne per il fatto che il Global 5000 è stato progettato con un’altezza di attraversamento della soglia di 50 piedi; un touchdown a 500 piedi richiederebbe un duck-under. Come di consueto in questi incidenti, le ragioni alla base della decisione di duck-under dell’equipaggio sono, beh, complicate.
Se non stai volando su qualcosa della classe delle dimensioni del Boeing 747, dovresti sicuramente sapere che i set vicini e medi di un indicatore di pendenza di avvicinamento visivo (VASI) sono per te, mentre i set medi e lontani sono per i jumbo. Ciò ha un senso intuitivo, poiché i piloti del grande jet sono seduti più in alto e più avanti rispetto al loro set di carrello di atterraggio più posteriore. Se non voli spesso in aeroporti non progettati per jet, potresti rimanere sorpreso nello scoprire che non tutti gli indicatori di percorso di avvicinamento di precisione (PAPI) sono installati alla stessa distanza lungo la pista. Non troverai la spiegazione nell’Aeronautical Information Manual o in qualsiasi altra risorsa per piloti. Ma l’ordine FAA JO 6580.2B, Visual Guidance Lighting Systems, fornisce una spiegazione del perché non tutti i PAPI sono creati uguali.
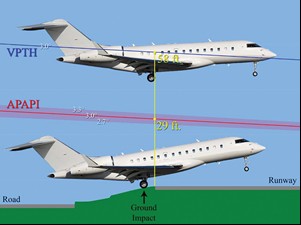
Differenze tra VPTH e APAPI sovrapposte alla vista laterale dell’aeroporto di Fox Harbour e alla geometria di atterraggio del Global 5000. Credito: Transportation Safety Board of Canada
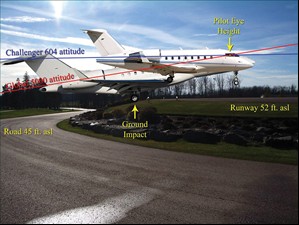
Atteggiamento e soglia del Global 5000 rispetto al Challenger 604.
Se è installato un sentiero di discesa del sistema di atterraggio strumentale (ILS), il PAPI dovrebbe essere posizionato e puntato in modo da coincidere con il sentiero di discesa elettronico. Se non è installato un ILS, il PAPI è posizionato per fornire un’altezza di attraversamento della soglia (TCH) richiesta e una distanza dagli ostacoli nell’area di avvicinamento. Il TCH richiesto dipende dal tipo di aeromobile principale che l’aeroporto si aspetta ed è selezionato dal gestore dell’aeroporto. Il problema è l’altezza degli occhi del pilota nella cabina di pilotaggio rispetto all’altezza delle ruote durante l’atterraggio. Gli aeromobili con un’altezza dalla cabina di pilotaggio alle ruote di 10 piedi o meno saranno mirati ad avere un’altezza di attraversamento visivo di 40 piedi. Gli aeromobili più alti sono mirati ancora più in alto, con i Boeing 747 e aeromobili simili a 75 piedi.
Il PAPI è in genere installato a 1.000 piedi oltre la soglia della pista, ma può essere installato più vicino su piste più corte. Un PAPI abbreviato (APAPI) può essere installato su piste con spazio limitato. Mentre un PAPI fornisce cinque indicazioni incrementali (troppo alto, leggermente alto, in rotta, leggermente basso, troppo basso), un APAPI ne fornisce solo tre (troppo alto, in rotta, troppo basso). L’APAPI a Fox Harbour era a 480 piedi dalla soglia, ben prima della consueta posizione di 1.000 piedi. L’altezza massima occhio-ruota per un sistema APAPI è di 10 piedi. L’altezza occhio-ruota del Global 5000 è stata calcolata in 17,2 piedi.
Volando un convenzionale 3 gradi. il glidepath dato da un PAPI progettato per aeromobili nella categoria di dimensioni Global 5000 avrebbe superato la soglia a circa 50 piedi, ma avrebbe anche toccato terra oltre l’obiettivo dichiarato dal pilota di 500 piedi. Volare con l’APAPI avrebbe reso raggiungibile l’obiettivo di touchdown, ma avrebbe eroso il margine di sicurezza TCH a meno di 30 piedi. Ma i piloti volarono ancora più in basso, probabilmente puntando al brick one. Un classico duck-under. Ma ci erano riusciti molte volte prima con il Challenger.
Il capitano aveva effettuato questo avvicinamento e atterraggio 75 volte volando con un Challenger 604. Il volo dell’incidente è stato il suo terzo tentativo con il più grande Global 5000. Oltre a essere più pesante (87.800 libbre contro 48.200 libbre di peso massimo consentito al decollo) e più lungo (96 piedi, 9 pollici contro 68 piedi, 5 pollici), il Global 5000 ha una geometria di atterraggio diversa. L’altezza occhio-ruota del Challenger è di circa 12 piedi, ovvero circa 5 piedi più bassa di quella del Global.
Ma c’è un altro fattore, ed è la geometria di avvicinamento di ogni aereo. Il Challenger vola relativamente a muso basso in avvicinamento, il che significa che il carrello di atterraggio non è così lontano sotto gli occhi del pilota. Il Global 5000, al contrario, vola relativamente a muso alto e il carrello di atterraggio è significativamente più basso degli occhi del pilota. Se l’equipaggio del Global 5000 avesse volato lo stesso profilo di avvicinamento sul Challenger, avrebbe raggiunto la pista. Ma, durante l’atterraggio accidentale, il carrello di atterraggio principale destro ha colpito il manto erboso a 7 piedi, 6 pollici prima della pista ed è crollato. Il Global ha continuato a percorrere la pista con l’ala destra che trascinava. L’aereo ha lasciato la pista 640 piedi dopo e ha ruotato di 120 gradi prima di fermarsi. L’unica ferita è stata al primo ufficiale, ma l’aereo è stato danneggiato in modo irreparabile.
Innanzitutto, i fattori attenuanti. Lo schianto del C-GXPR ha aperto gli occhi a molti. Pochi piloti hanno sentito il termine “altezza occhio-ruota” e ancora meno l’hanno preso in considerazione. La maggior parte dei piloti probabilmente darebbe per scontato che un set di PAPI sia molto simile a qualsiasi altro. La geometria di avvicinamento del Challenger 604 è ovviamente diversa da quella del Global. Ma quanti piloti con esperienza in entrambi i velivoli capiscono quanto sia più basso il carrello di atterraggio del Global?
Ora, iniziamo il quarterbacking del lunedì mattina. Molti di noi che pilotano velivoli nelle classi di peso da Challenger a Global considerano 5.000 piedi come una lunghezza minima della pista. Quando ci si avvicina a una pista del genere, si è tentati di barare e mirare a un’altezza inferiore al normale punto di mira di 1.000 piedi nel tentativo di abbassare le ruote prima del normale punto di atterraggio di circa 750 piedi. Ogni volta che lo fai, rafforzi l’idea nel tuo subconscio che mirare a un’altezza inferiore va bene. La prossima volta che ti troverai nella stessa situazione ma con una pista un po’ più corta, un po’ contaminata, forse con un ostacolo e forse senza un sorpasso, sarai tentato di puntare al brick one. Ogni volta che un brick one landing ha successo, diventa un’altra voce nel registro: gli atterraggi brick one funzionano. Hai normalizzato una deviazione dalle procedure operative standard.
Sarebbe facile dire che gli unici piloti a rischio per il duck-under sono quelli che sono diventati abitualmente non conformi o non danno abbastanza enfasi al fare le cose nel modo giusto, ogni volta. Ma anche i piloti più diligenti sono a rischio.
Ultimo volo di Air Canada 624
Mentre esamino un rapporto di incidente, spesso rimango colpito dalla compiacenza dell’equipaggio, dalla sua abituale non conformità o dalla mancanza di una conoscenza critica. Non è stato così nel caso del volo Air Canada 624, un Airbus A320 che si è schiantato durante l’atterraggio il 29 marzo 2015. L’equipaggio sembrava fare tutto secondo le regole durante l’avvicinamento all’aeroporto internazionale di Halifax-Stanfield (CYHZ), Nuova Scozia. In effetti, mi sembra che i piloti abbiano commesso solo due errori. Il primo sembra banale prima di ulteriori ricerche. Il secondo avrebbe potuto colpire chiunque di noi.

Conseguenze del volo Air Canada 624. Credito: Transportation Safety Board of Canada
Era una notte fredda ad Halifax e i venti hanno imposto l’avvicinamento con solo localizzatore alla pista 5. L’equipaggio ha determinato un’altezza di 200 piedi. correzione della temperatura fredda alla loro quota di avvicinamento finale (FAF), portandola a 2.200 piedi. Hanno anche regolato la loro quota minima di discesa (MDA) a 813 piedi utilizzando una correzione di 23 piedi e i 50 piedi aggiunti dalla loro compagnia aerea. Hanno anche regolato l’angolo di discesa da 3,08 gradi a 3,5 gradi, per compensare la maggiore quota di regolazione al FAF rispetto alla MDA. Questa regolazione mi ha sorpreso. Era conforme a una tabella nel Manuale operativo di volo (FOM) della loro compagnia aerea ed era matematicamente corretta. Non ho una tabella del genere nel mio FOM.
Un altro mio fastidio quando leggo i rapporti sugli incidenti è la natura sprezzante degli equipaggi durante le fasi critiche del volo e molto spesso la necessità di censurare le trascrizioni del registratore vocale della cabina di pilotaggio a causa di una proliferazione di parolacce. Non è così con questo equipaggio. Tutti i briefing erano approfonditi. Ogni chiamata è stata fatta quando necessario. Questi ragazzi erano bravi.
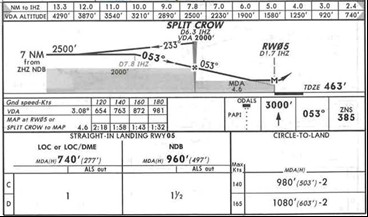
Vista di profilo dell’avvicinamento ad Halifax. Credito: Transportation safety Board of Canada
La visibilità era scarsa, oscillando tra 0,25 e 0,5 miglia sulla neve. Le specifiche operative di Air Canada consentivano agli equipaggi di effettuare avvicinamenti strumentali al 50% dei valori di visibilità pubblicati, a condizione che l’avvicinamento fosse accoppiato. Il FOM della compagnia aerea ha inoltre specificato che in questa situazione la guida laterale dell’autopilota doveva provenire dal localizzatore e la guida verticale dall’angolo di traiettoria di volo (FPA) calcolato per attraversare la soglia della pista a 50 piedi. Se non hai familiarità con un FPA, pensa alla velocità verticale o alla modalità di velocità verticale di un autopilota convertita da piedi al minuto a gradi. È per molti versi superiore in quanto non richiede una regolazione con la velocità dell’aria. Ma ha i suoi limiti, come ha scoperto questo equipaggio. E questo ci porta al loro primo errore.
Il loro FOM ha specificato che 0,3 nm prima del FAF l’equipaggio avrebbe dovuto selezionare la modalità FPA dell’autopilota e impostarla su 0,0 gradi per mantenere il volo livellato. Al FAF il pilota deve comandare l’angolo di discesa richiesto. Il pilota ha impostato l’FPA a -3,5 gradi a 0,3 nm e l’aereo ha iniziato la discesa 0,2 nm prima. Potrebbe sembrare banale, ma facendo i calcoli si ottiene 0,2 x 6.076 = 1.215 piedi. Quindi, se tutto il resto fosse rimasto come previsto, il loro percorso verticale li avrebbe posizionati all’altezza della pista due decimi di miglio prima della pista. Ovviamente, le cose raramente rimangono come previsto.
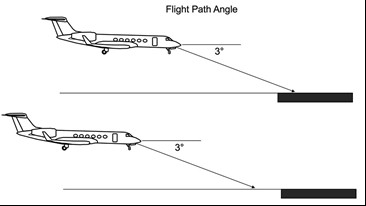
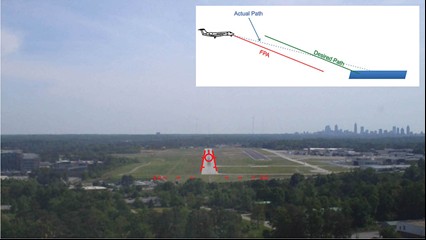
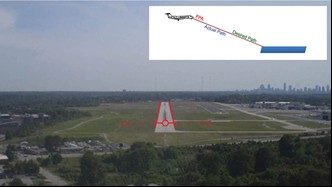
FPA contro percorso di volo. Credito: Transportation Safety Board of Canada
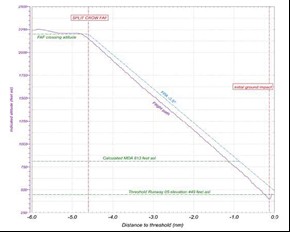
Mentre l’aereo scendeva, i cambiamenti del vento, le turbolenze occasionali e altri disturbi spingevano l’aereo più in basso rispetto al profilo iniziale. A differenza di un sentiero di discesa ILS o del percorso verticale di una navigazione verticale, l’FPA viene disegnato dall’aereo verso il basso, non da terra verso l’alto. Non termina nella zona di atterraggio della pista, termina solo all’angolo selezionato da qualsiasi punto l’aereo si trovi.
L’equipaggio è arrivato all’MDA 0,3 nm prima, il che equivale a 0,3 x 6.076 = 1.823 piedi prima della pista. L’equipaggio ha individuato le luci di avvicinamento e ha continuato la discesa, ancora agganciato al pilota automatico. Il pilota automatico, da parte sua, si è accontentato di puntare a 1.823 piedi prima della zona di atterraggio, ben prima della pista. Facendo i calcoli, avrebbero dovuto essere a 5.182 piedi dalla pista all’MDA, ma in realtà erano a circa 7.000 piedi dalla pista. La loro visuale delle luci di avvicinamento era a -2,2 gradi, non a -3,08 gradi. Riesci a individuare una differenza inferiore a un grado? Io di certo non ci riesco.
Hanno continuato l’avvicinamento accoppiato fino alla chiamata automatica del loro sistema di “100”, a quel punto il pilota automatico è stato disconnesso. Alla chiamata “50” entrambi i piloti si sono resi conto che stavano puntando alle luci di avvicinamento e non alla pista. Il pilota ha iniziato un go-around, ma era troppo tardi. Uno degli pneumatici principali di sinistra ha toccato una luce di avvicinamento situata a 861 piedi dalla soglia. Il carrello principale sinistro, la fusoliera inferiore posteriore e il motore sinistro hanno colpito il suolo. L’aereo è scivolato sulla pista prima di fermarsi a soli 1.900 piedi oltre la soglia. Non ci sono stati feriti, ma l’aereo è stato danneggiato in modo irreparabile.
Molti di questi casi di studio di incidenti sono inquietanti perché ti lasciano a chiederti: “Come ha potuto un equipaggio professionista fare una cosa del genere?” Ma questo incidente è inquietante per me perché mi lascia a chiedermi: “Avrei potuto fare di meglio?” L’errore di discesa iniziale di 0,3 nm sembra quasi banale. Se fossi arrivato a un MDA 1.823 piedi prima del dovuto e avessi individuato le luci di avvicinamento, avrei lasciato il pilota automatico inserito un po’ più a lungo, proprio come aveva fatto questo equipaggio. Ma una seconda lettura del rapporto mi dice che avrei potuto fare di meglio, spero, grazie ad alcune tecniche che ho imparato negli anni. Quindi, l’unica domanda che mi rimane è se avrei avuto la prontezza di spirito di usare quelle tecniche. Ma sono tecniche che vale la pena conoscere.
Risolvere il problema con la geometria
Quando iniziamo il nostro addestramento al volo, sentiamo spesso dire che il punto sul parabrezza che non si muove è dove siamo diretti e quando si vola su un trainer primario molto piccolo questo è per lo più vero. È lì che sono diretti i tuoi occhi, ma le tue ruote sono dietro e sotto di te; sono diretti a breve distanza da quel punto. In un Cessna 152 o Piper Arrow, la differenza è troppo piccola per preoccuparsene. Man mano che l’aereo diventa più grande, quelle distanze diventano più importanti.
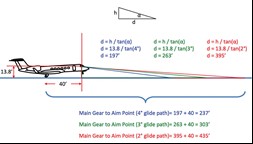
L’effetto del percorso di planata sul punto di atterraggio rispetto al punto di mira.
Una delle lezioni apprese dall’incidente del Global 5000 a Fox Harbour è stata la necessità di rendersi conto che c’è una differenza tra l’altezza dei tuoi occhi e delle tue ruote in un assetto di atterraggio. Nel mio Gulfstream G450, ad esempio, i miei occhi sono a 10,5 piedi da terra quando l’aereo è in un assetto a tre punti. Ma durante l’atterraggio, quando il carrello principale tocca, la ruota anteriore è ancora in aria e i miei occhi sono a 13,8 piedi sopra la superficie. Mentre i miei occhi attraversano la soglia a 50 piedi, le mie ruote sono a 36. Il mio margine di errore è ridotto.
Non solo i miei occhi sono sopra le ruote, sono a 40 piedi davanti a loro. Ma l’angolo di visuale dall’abitacolo al mio punto di mira cambia ulteriormente la matematica. Da un percorso di planata di 3 gradi, i miei occhi saranno a 303 piedi in avanti rispetto al punto in cui tocca il mio carrello principale. Questa distanza varia con la geometria dell’aereo e con il percorso di planata percorso. Per la maggior parte dei jet aziendali, puntare a 1.000 piedi abbassa le ruote proprio intorno alla zona di atterraggio, a patto che il flare non sia esagerato. Puntare a 500 piedi ti porta appena oltre la soglia. Puntare al mattone uno ti rende un bersaglio facile per quelle luci di avvicinamento.
È assolutamente fondamentale che i piloti di aeromobili della categoria trasporto capiscano quanto velocemente qualsiasi margine di errore può essere cancellato quando non si riesce a rispettare un’altezza di attraversamento della soglia di 50 piedi e un atterraggio nella zona di atterraggio. Con questa comprensione, i piloti dovrebbero capire su cosa si basa ogni tipo di indicazione del percorso di planata dell’abitacolo e cosa significano effettivamente le informazioni visualizzate. Ci sono quattro attori principali:
- Un sentiero di planata ILS.
- Una prestazione di localizzatore con guida verticale (LPV) percorso verticale (VPATH).
- Una navigazione verticale (VNAV) VPATH.
- Un FPA.
Un segnale di pendenza di discesa ILS viene trasmesso da antenne trasversali al tuo punto di atterraggio; è da lì che provengono. Se segui la pendenza di discesa per l’atterraggio, ci sono due cose fondamentali da sapere. Innanzitutto, se segui il raggio, finirai sulla pista, indipendentemente dal vento o dalla temperatura. In secondo luogo, il raggio si restringe man mano che ti avvicini all’antenna. Quindi, proprio quando vuoi che il segnale diventi più preciso, lo fa. Un sentiero di discesa di 3 gradi scende di 318 piedi ogni miglio nautico. La matematica: 6.076 piedi per miglio nautico per sin (3 gradi) = 318 piedi. A 1 nm, volando due punti bassi ti porta a 6.076 volte sin (1 grado) = 106 piedi. Ma attraversando la soglia, A 750 piedi dal touchdown, il raggio si restringe e sarai a 750 volte il sin (3 gradi) = 39 piedi. Volare due punti bassi ti porta a 750 volte il sin (1 grado) = 13 piedi sopra la pista.
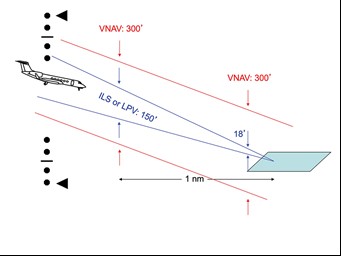
Tolleranze di deflessione tipiche su vasta scala per percorsi di discesa ILS, LPV e VNAV.
Per la maggior parte degli approcci LPV, le tolleranze sono identiche all’ILS. Sebbene non ci sia un’antenna che trasmette al tuo aereo, la tua avionica costruisce il percorso in modo che appaia esattamente così. La conclusione sia per l’ILS che per l’LPV è che mantenere centrato quel sentiero di discesa o ago VPATH assicura di finire oltre la soglia a un’altezza adeguata per un atterraggio nella zona di touchdown. Anche volare due punti bassi ti tiene fuori dalla polvere, a condizione che non ci siano ostacoli sulla strada.
Un percorso verticale VNAV è completamente diverso. La tolleranza rimane costante indipendentemente dall’altitudine dell’aereo o dalla distanza dalla pista. Volare due punti bassi su un sistema tipico può lasciarti 150 piedi troppo basso a 1 nm, il che significa che sarai a (318 – 150) = 168 piedi. Ma la tolleranza è la stessa quando attraversi la soglia. Volare con il VNAV centrato ti porta alla pista. Cavalcare la parte inferiore del VNAV a due punti bassi significa che sarai all’elevazione della pista (150 – 50)/tan (3 gradi) = 1.908 piedi prima della pista. A differenza del sentiero di discesa ILS, del VPATH LPV o del percorso VNAV, un FPA viene disegnato dall’aereo al suolo.
A differenza del sentiero di discesa ILS, del VPATH LPV o del percorso VNAV, un FPA viene disegnato dall’aereo al suolo. Puoi essere esattamente sul FPA mentre miri a diverse miglia di distanza.
La funzione angolo di traiettoria di volo (Flight Path Angle) non si preoccupa di dove si trovi la pista.
Ci sono ovviamente problemi nel pilotare un VNAV o FPA pensando di essere sicuro di finire nella zona di atterraggio della pista. Entrambi i sistemi possono lasciarti ben prima della pista. Ci sono due metodi per risolvere tutto questo: controlla la distanza rispetto all’altitudine o, se hai la tecnologia, usa il FPA e il vettore di traiettoria di volo (Flight Path Vector) sovrapposti alla pista.
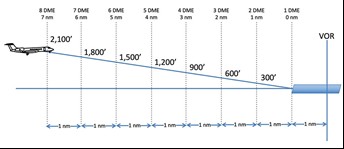
Il modo più semplice per assicurarti di non scendere al di sotto di un sentiero di discesa corretto, anche se non hai un ILS o LPV che ti guida a farlo con precisione, è semplicemente calcolare di non essere più in basso di 300 piedi sopra il suolo per ogni 1 nm dalla pista. Mentre il numero reale per un glidepath di 3 gradi è 318 ft./nm, 300 ft./nm è facile da calcolare e abbastanza vicino. Avere una lettura GPS della distanza dalla pista è l’ideale. Ma diciamo, ad esempio, che il DME si basa su un VOR 1 nm oltre l’estremità di avvicinamento della pista. Basta sottrarre un miglio a ogni obiettivo. Ai tempi in cui non avevo un’opzione migliore, segnavo a matita queste altitudini obiettivo sulla carta di avvicinamento.
L’equipaggio del volo Air Canada 624 aveva proprio una tabella del genere disegnata sulla carta di avvicinamento per loro. Questa è una tecnica inestimabile, ma se hai la tecnologia, c’è qualcosa di ancora meglio.
Risolvere il problema con la tecnologia
Molti aerei che visualizzano un FPA visualizzeranno anche un FPV. L’FPA visualizza una linea che raffigura dove finirà l’aereo se volato lungo un angolo impostato sopra o sotto l’aereo. Come ha scoperto l’equipaggio del volo 624 di Air Canada, all’FPA non importa dove si trova rispetto alla pista. L’FPV mostra dove è diretto l’aereo. Sia l’FPA che l’FPV mostrano le effettive prestazioni dell’aereo, il che è di scarsa utilità per il pilota in atterraggio a meno che non gli venga presentato un terzo elemento: la posizione della pista.
Esempio: valutazione dell’altitudine sopra la pista rispetto alla distanza.
Gli aerei con display head-up (HUD) o sistemi di visione sintetica (SVS) che mostrano la pista così come un FPA e un FPV hanno un netto vantaggio nella necessità di arrivare oltre la soglia della pista all’altitudine corretta e sulla pista nella zona di atterraggio.
Questa tecnica non ha bisogno di un ILS, LPV o persino di un VNAV. Può essere pilotata su una pista senza alcun avvicinamento. Alcuni la chiamano “camminare sull’FPA”, che suppongo sia un nome buono come un altro. Mettiamoci nella situazione del volo 624 di Air Canada presso l’MDA per un esempio.
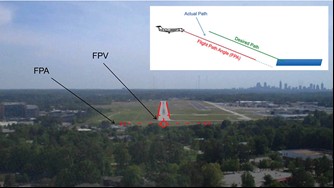
Un avvicinamento all’aeroporto di Atlanta DeKalb-Peachtree (KPDK) con FPA e FPV puntati poco prima della pista.
Sollevare l’FPV dell’aereo per “volare lungo il percorso”.
Riportare l’FPV all’FPA, proprio sopra la zona di atterraggio della pista.
Il pilota automatico dell’aereo stava volando esattamente verso l’FPA selezionato, ma l’equipaggio non si è accorto che l’FPA era puntato molto prima della pista. Se avessero avuto una rappresentazione sintetica della pista, avrebbero visto che sia l’FPA che l’FPV erano puntati poco prima. Semplicemente sollevare l’FPV verso la pista avrebbe comportato un percorso di planata poco profondo con gli occhi puntati correttamente ma il carrello di atterraggio ancora corto. Aggiungere due passaggi al processo garantisce non solo un punto di mira corretto, ma anche il percorso di planata corretto.
Invece di tirare indietro il pitch abbastanza da posizionare l’FPV sopra la zona di touchdown, il muso dovrebbe essere sollevato abbastanza da spostare l’FPV oltre la zona di touchdown nel tentativo di intercettare il corretto percorso di planata. Una volta fatto questo, l’FPA inizierà a muoversi in avanti, essenzialmente “camminando” verso la zona di touchdown. Quindi sarai sul percorso di planata corretto ma mirando lontano. Abbassa semplicemente il muso in modo che l’FPV coincida con l’FPA proprio sopra la zona di touchdown.
Risolvere il problema con la ripetizione
Penso che comprendere la geometria del tuo aereo quando attraversi la soglia della pista sia il primo passo per correggere una tendenza al duck-under. Conoscere le altitudini target con la distanza da percorrere è un ottimo modo per assicurarti di non essere abbindolato da un duck-under. Rendersi conto che uno o due puntini in basso non significano la stessa cosa con vari sistemi di misurazione del percorso di discesa dovrebbe essere molto utile per evitare di accettare un approccio al di sotto del percorso di discesa. Ma che dire del problema di un’illusione ottica?
La mia più recente immersione nel duck-under è avvenuta come pilota civile mentre volavo verso l’aeroporto DeKalb-Peachtree di Atlanta (KPDK). A prima vista, la pista 21L non è corta. Infatti, a 6.001 piedi, è al limite dell’essere comoda per la maggior parte dei jet aziendali. Ma ha una soglia spostata di 1.200 piedi e per qualche motivo superare quella quantità di pavimentazione era più di quanto potessi resistere. Quindi, ho adottato una tecnica di mira alla soglia spostata. Dopo aver fatto questo per circa un anno, ho chiesto al dipartimento di volo in che modo stavamo normalizzando la deviazione. La risposta n. 1 è stata la pista 21L a KPDK.
Con un po’ di introspezione, ci siamo resi conto che i nostri numeri di prestazioni si basavano sull’atterraggio nella zona di atterraggio. Abbiamo concordato di raddrizzare e volare correttamente. I nostri successivi avvicinamenti a Peachtree erano proprio sul sentiero di discesa e fermarsi non era un problema. Di recente abbiamo effettuato un avvicinamento ai minimi sulla pista 21L; abbiamo attraversato la soglia spostata a 50 piedi, siamo atterrati nella zona di atterraggio ed eravamo alla velocità di rullaggio ben prima della fine della pista.
Pensando a quell’avvicinamento, devo chiedermi che cosa si vedeva dalla cabina di pilotaggio dell’RC-135S Exult 66. Mi chiedo se il pilota avesse interiorizzato la vista delle luci di avvicinamento da un punto leggermente al di sotto del sentiero di discesa nel corso degli anni e il giorno fatidico i suoi occhi gli hanno detto che era solo leggermente al di sotto del suo solito sentiero di discesa leggermente al di sotto. Penso che sarebbe stato ben servito se gli fosse stata inculcata nella testa la corretta immagine visiva. Il modo migliore per farlo è seguire ogni volta il percorso di discesa corretto.
Questa volta è stato più tecnico, spero sia stato interessante
Giannipilota


